| 首页 | 公司简介 | 产品展台 | 开发生产 | 资料下载 | 技术支持 | 解决方案 | 展会消息 |
| 代理经销 | 集成电路 | 高频微波 | 消费电子 | 工控网络 | 安防报警 | 光纤光电 | 汽车电子 |
| 合作交流 | 留言本 | 友情连接 | 热卖产品 | 销售网络 | 招聘加盟 | 新品介绍 | 联系我们 |
|
|
| 产品资料 | 技术资料 | 样例工程 | 产品驱动 | 参考设计 | 应用电路 | 通讯协议 | 使用说明 | 支持软件 | 数据查询 | 问题解答 | 标准法规 | 图书资料 | 基础知识 |
![]() 螺传感器/陀螺仪
螺传感器/陀螺仪![]() 超声波物位变送器
超声波物位变送器![]() 射频物位开关
射频物位开关![]() 浮球液位变送器
浮球液位变送器![]() 浮球液位开关
浮球液位开关![]() 投入式静压液位变送器
投入式静压液位变送器![]() 双界面油水分析仪
双界面油水分析仪![]() 料位开关/音叉料位开关系列
料位开关/音叉料位开关系列![]() 电容物位计
电容物位计![]() 智能磁致伸缩液位仪
智能磁致伸缩液位仪![]()
![]()
![]() 霍尔元件/霍尔IC/霍尔传感器
霍尔元件/霍尔IC/霍尔传感器![]() 电子指南针
电子指南针
![]() 电子罗盘
电子罗盘![]() 陀螺仪/角速度传感器
陀螺仪/角速度传感器 ![]() 磁传感器
磁传感器 ![]() 加速度传感器
加速度传感器 ![]() 三维数字罗盘
三维数字罗盘 ![]() 二维数字罗盘
二维数字罗盘 ![]() 倾角传感器/模块
倾角传感器/模块![]()
![]()
|
IMU惯性测量单元
发表日期:2013-3-21 10:03:50 作者:未知 来源:未知
1、背景技术
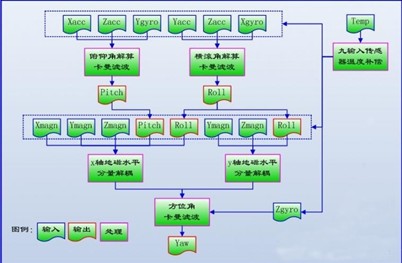
利用三轴地磁解耦和三轴加速度计,受外力加速度影响很大,在运动/振动等环境中,输出方向角误差较大,此外地磁传感器有缺点,它的绝对参照物是地磁场的磁力线,地磁的特点是使用范围大,但强度较低,约零点几高斯,非常容易受到其它磁体的干扰, 如果融合了Z轴陀螺仪的瞬时角度,就可以使系统数据更加稳定。加速度测量的是重力方向,在无外力加速度的情况下,能准确输出ROLL/PITCH两轴姿态角度 并且此角度不会有累积误差,在更长的时间尺度内都是准确的。但是加速度传感器测角度的缺点是加速度传感器实际上是用MEMS技术检测惯性力造成的微小形变,而惯性力与重力本质是一样的,所以加速度计就不会区分重力加速度与外力加速度,当系统在三维空间做变速运动时,它的输出就不正确了。 陀螺仪输出角速度,是瞬时量,角速度在姿态平衡上是不能直接使用, 需要角速度与时间积分计算角度,得到的角度变化量与初始角度相加,就得到目标角度,其中积分时间Dt越小,输出角度越精确,但陀螺仪的原理决定了它的测量基准是自身,并没有系统外的绝对参照物,加上Dt是不可能无限小,所以积分的累积误差会随着时间流逝迅速增加,最终导致输出角度与实际不符,所以陀螺仪只能工作在相对较短的时间尺度内。 所以在没有其它参照物的基础上,要得到较为真实的姿态角,就要利用加权算法扬长避短,结合两者的优点,摈弃其各自缺点,设计算法在短时间尺度内增加陀螺仪的权值,在更长时间尺度内增加加速度权值,这样系统输出角度就接近真实值了. 2、技术原理 MIN-900-2微型陀螺测量系统由三个方向的磁传感器、三个方向的角速率传感器、三个方向的加速度传感器和信号处理单元组成,通过磁传感器和加速度传感器解算载体的三维静态角度,利用角速度值滤波处理静态角度,同时运用静态角度数据抑制陀螺漂移,使系统实时准确的输出在地球坐标系下载体在空间中的姿态角。 三轴地磁解耦如果只用三轴加速度计,受外力加速度影响很大,在运动/振动等环境中,输出方向角误差较大 ,而且实时性较差,几乎无法跟随动态运动的载体,完整的解决方案是利用陀螺仪测量角速度动态测量载体运动变化,用静态测量角度补偿陀螺漂移。
3、系统软件结构
4、应用范围 应用于无人航空器及车辆的导航、姿态测量、各种跟踪和稳定系统、姿态参考、船舶姿态的动态测量、机器人应用、机器及制造业。 |
|
更多产品请看本公司产品专用销售网站:欢迎索取免费详细资料、设计指南和光盘 ;产品凡多,未能尽录,欢迎来电查询。
中国传感器科技信息网:http://www.sensor-ic.com/SSTKJ工控安防网:http://www.pc-ps.net/
SSTKJ电子 元器件网:http://www.sunstare.com/SSTKJ微波光电产品网:HTTP://www.rfoe.net/
消费电子产品网://www.icasic.com/科技产品网://www.sunstars.cn/传感器销售热线:
地址:深圳市福田区福华路福庆街鸿图大厦9732室
电话:0755-83376489 83376549 83607652 83370250 83370251 83376549
传真:0755-83376182 (0)13902971329 MSN: xjr5@163.com
邮编:518033 E-mail:szss20@163.com QQ: 195847376
深圳赛格展销部:深圳华强北路赛格电子市场9583号 电话:0755-83665529 13823648918
技术支持: 0755-83394033 13501568376
北京分公司:北京海淀区知春路132号中发电子大厦3097号 TEL: 13823791822 FAX:010-62543996
上海分公司:上海市北京东路668号上海賽格电子市场地下一层D25号 TEL: 56703037 13823676822 FAX:021-56703037
西安分公司:西安高新开发区20所(中国电子科技集团导航技术研究所) 西安劳动南路88号电子商城二楼D23号
TEL: 18926764199 FAX:029-77678271