|
|
|
|
|
GPS/INS组合导航系统 姿态方位参考系统/AHRS 垂直陀螺/VG 惯性测量单元/IMU
简介
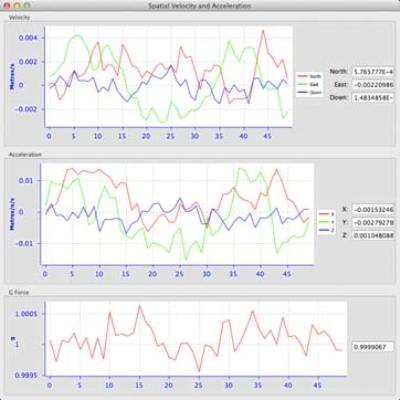
RT系列GPS/INS组合导航系统能提供高性价比的测量性能。RT2000内部采用低成本的GPS,可以选择单/双天线,100/250Hz输出。RT3000内部集成高精度的GPS,可以选择单/双天线,100Hz输出。RT4000在硬件上与RT3000相同,为250Hz输出。
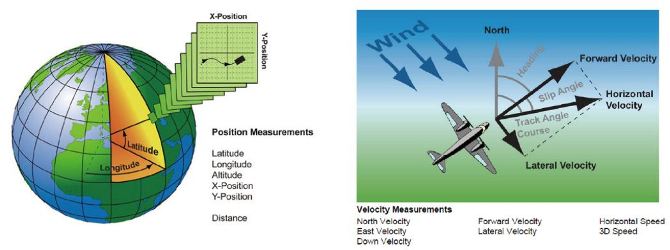
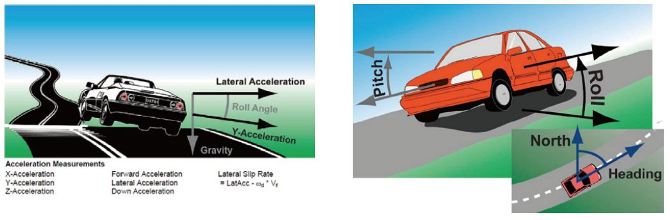
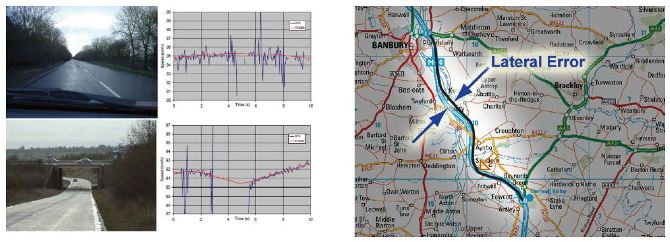
由于多路经,卫星参数等因素的影响,单纯的GPS输出数据会发生跳动,RT通过惯性传感器陀螺仪和加速度计来计算位置速度、方位姿态等测量数据,依靠传感器本身,没有跳动。外接的GPS用于消除惯性器件漂移而带来的稳定性误差。
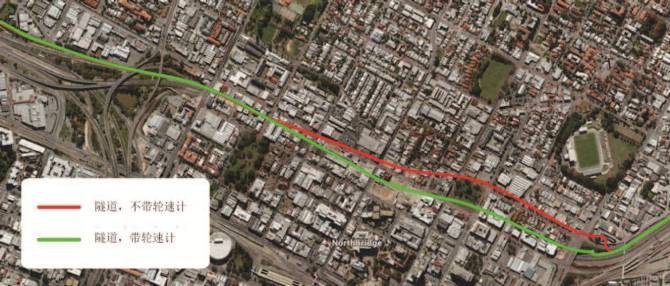
即使GPS信号丢失,RT仍然能通过内部的惯性传感器来继续输出数据。可以通过轮速计等装置,校正位置漂移,在2分钟正常行驶的条件下,位置误差不会大于5米。
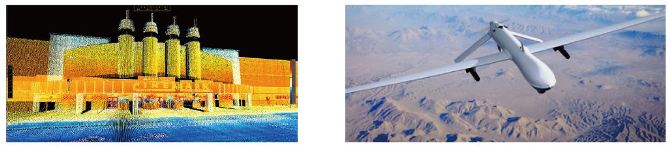
RT不仅能提高位置和速度性能指标,同时也能增强航向和姿态性能指标,而三轴的角度数据精度对于校正机载/车载摄相机或者激光雷达误差来说非常重要。
选用双天线设计的RT产品,提高了航向精度,使用双天线解决方案,在低动态条件下,能得到更高的航向精度和稳定性,比如飞机在平飞的条件下。在长航线飞行时,能输出恒稳定的航向精度,在该条件下,单纯使用惯性会降低航向精度。
RT系列产品通过RS232,Ethernet,CAN接口来输出数据。对于需要模拟量接口的客户来说,可以选用RT-ANA产品,RT-ANA读取CAN总线上的数据,采用16位精度的DAC输出,可以16个通道实时高精度输出,模拟两输出电压为±10V。
RT系列产品内部包含3个军工级角度率陀螺仪,3个伺服军工级加速度计,一体化设计,内部集成了低成本GPS(RT2000),高精度的GPS(RT3000/4000)。
配置软件可轻易的改变安装角,移动测量点至虚拟位置,选用GPS类型等。24阶卡尔曼滤波,自动校正天线、安装位置等引起的误差,安装起来非常简单,不像其它公司的惯导,需要精确的对准和对安装位置误差要求很高。
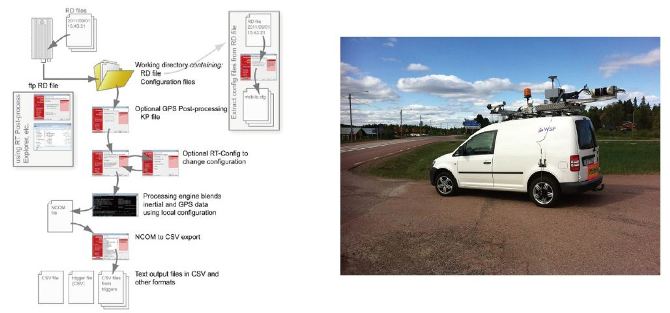
内部集成了2GB的存储卡,可单独运行。对于事后处理,数据可以导出为ASCII文本格式,方便其它软件加载。产品的数据输出延时时间非常小,可以不用等待GPS的测量数据,在0.5s的GPS输入信号延时的情况下,RT产品仍然能够校正它。
内部的ADC转换,20bit分辨率,加速度测量的分辨率是0.12mm/s²(12
μg)。ADC转换模拟量输入,采用圆锥/划船(coning/sculling)运动补偿算法来避免信号的混淆。
内部的处理包括捷联算法(采用WGS-84地球坐标),卡尔曼滤波和飞行中校准等算法。内部的英特尔奔腾级处理器运行QNX实时操作系统,保证了数据的稳定、可靠和实时性。
单天线
vs
双天线
RT产品内部的高级算法可以使路面车辆客户通过单天线来满足绝大部分的应用需求。航向锁定和高级侧滑角特性可以使其在静止和低动态环境下维持精确的航向值。机载或者船载之类的低动态应用场合可以使用双天线系统来维持高精度的航向值。
在单天线和双天线的数据手册中,某些条件下,二者的航向精度是相同的。然而,双天线产品可以在各种条件下提供稳定的航向值,而单天线产品在机载/船载/低动态车载条件下,航向精度会有所下降。
双天线的航向精度
在理想的情况下,空阔环境,双天线系统,天线的基线长度,每增加1m,可以得到0.3degree(1σ)的精度。建议基线长度是2m,在静止的条件下,可以得到0.15degree的航向精度。在动态条件下,航向精度可以得到提高,因为此时的多路经误差处于变化之中,算法可以把该误差给滤掉。
基线的长度可以大于2m,但是需要特殊的校准过程。在5m的基线长度下,可以达到0.05degree的航向精度。天线安装误差可能会影响更高的航向精度。
数据手册中给出的航向精度比0.15degree要高,在动态环境下,或者用于陆地车辆,实际的航向精度要比通过双天线所能获得的值要好。在静止时,空阔的环境下,2m的基线长度只能得到0.15degree(RMS)的航向精度。
性能参数
|
RT2000/RT3000/RT4000
GPS/INS组合导航系统 |
|
单天线,100Hz输出 |
RT2500 |
|
RT2002 |
RT2004 |
RT3002 |
|
单天线,250Hz输出 |
RT2500-250 |
|
RT2002-250 |
RT2004-250 |
RT4002 |
|
双天线,100Hz输出 |
|
RT2502 |
|
|
RT3003 |
|
双天线,250Hz输出 |
|
RT2502-250 |
|
|
RT4003 |
|
GNSS类型 |
L1 |
L1 |
L1/L2 |
GG-L1 |
L1/L2 |
|
位置精度 |
3.0mCEP SPS
2.0m CEP SBAS |
3.0mCEP SPS
2.0m CEP SBAS |
1.5m CEP SPS
0.6m CEP SBAS
0.4m CEP DGPS
50cm CEP VBS
15cm CEP XP
10cm CEP HP
20cm 1σ L1
2cm 1σ L1/L2 |
1.8m CEP SPS
0.6m CEP SBAS
0.4m CEP DGPS
50cm CEP VBS
20cm 1σ L1
2cm 1σ GG-L1 |
1.5m CEP SPS
0.6m CEP SBAS
0.4m CEP DGPS
50cm CEP VBS
15cm CEP XP
10cm CEP HP
20cm 1σ L1
2cm 1σ L1/L2 |
|
速度精度 |
0.2 km/h RMS |
0.2 km/h RMS |
0.1 km/h RMS |
0.1 km/h RMS |
0.05 km/h RMS |
|
俯仰/横滚 |
0.15° 1σ |
0.15° 1σ |
0.05° 1σ |
0.05° 1σ |
0.03° 1σ |
|
航向 |
0.3° 1σ |
0.2° 1σ |
0.1° 1σ |
0.1° 1σ |
0.1° 1σ |
|
跟踪角
(at 50km/h) |
0.25° 1σ |
0.25° 1σ |
0.1° 1σ |
0.1° 1σ |
0.07° 1σ |
|
侧滑角
(at 50km/h) |
0.4° 1σ |
0.4° 1σ |
0.2° 1σ |
0.2° 1σ |
0.15° 1σ |
|
横向速度 |
0.5% 1σ |
0.4% 1σ |
0.2% 1σ |
0.2% 1σ |
0.2% 1σ |
|
单天线,100Hz输出 |
RT3020 |
RT3100 |
RT3200 |
RT3040 |
RT3050 |
|
单天线,250Hz输出 |
RT4020 |
RT4100 |
RT4200 |
RT4040 |
RT4050 |
|
双天线,100Hz输出 |
RT3022 |
RT3102 |
RT3202 |
RT3042 |
RT3052 |
|
双天线,250Hz输出 |
RT4022 |
RT4102 |
RT4202 |
RT4042 |
RT4052 |
|
GNSS类型 |
L1 |
L1 |
L1 |
L1/L2 |
L1 |
|
位置精度 |
1.8m CEP SPS
0.6m CEP SBAS
0.4m CEP DGPS
50cm CEP VBS
20cm 1σ L1 |
1.8m CEP SPS
0.6m CEP SBAS
0.4m CEP DGPS |
3.0m CEP SPS
1.4m CEP SBAS
1.0mCEP DGPS |
1.5m CEP SPS
0.6m SBAS
0.4m CEP DGPS
50cm CEP VBS
15cm CEP XP
10cm CEP HP |
1.8m CEP SPS
0.6m CEP SBAS
0.4m CEP DGPS
50cm CEP VBS |
|
速度精度 |
0.08 km/h RMS |
0.1 km/h RMS |
0.2 km/h RMS |
0.07 km/h RMS |
0.08 km/h RMS |
|
俯仰/横滚 |
0.04° 1σ |
0.05° 1σ |
0.1° 1σ |
0.03° 1σ |
0.04° 1σ |
|
航向 |
0.1° 1σ |
0.1° 1σ |
0.2° 1σ |
0.1° 1σ |
0.1° 1σ |
|
跟踪角
(at 50km/h) |
0.1° 1σ |
0.15° 1σ |
0.2° 1σ |
0.08° 1σ |
0.1° 1σ |
|
侧滑角
(at 50km/h) |
0.15° 1σ |
0.2° 1σ |
0.3° 1σ |
0.15° 1σ |
0.15° 1σ |
|
横向速度 |
0.2% 1σ |
0.2% 1σ |
0.3% 1σ |
0.2% 1σ |
0.2% 1σ |
|
RT2000/RT3000/RT4000
GPS/INS组合导航系统 |
|
加速度 |
|
物理及环境指标 |
|
|
-偏差 |
10 mm/s² 1σ |
计算延时 |
3.5 ms |
|
-非线性 |
0.01% 1σ |
电源 |
9-18 V
d.c.
15W |
|
-比例因子 |
0.1% 1σ |
尺寸(mm)(RT2000) |
234 x 120 x 76 (不含连接头) |
|
-量程 |
100/300 m/s² |
尺寸(mm)(RT3000/RT4000) |
234 x 120 x 80 (不含连接头) |
|
角速度 |
|
重量 |
2.3 kg |
|
-偏差 |
2 deg/hr 1σ |
工作温度 |
–10 to 50°C |
|
-随机游走 |
0.2 deg/√hr 1σ |
振动 |
0.1 g²/Hz 5-500 Hz |
|
-比例因子 |
0.2% 1σ |
冲击 |
100G, 11ms |
|
-量程 |
100/300 °/s |
内部存储 |
2GB |
|
|
|
|
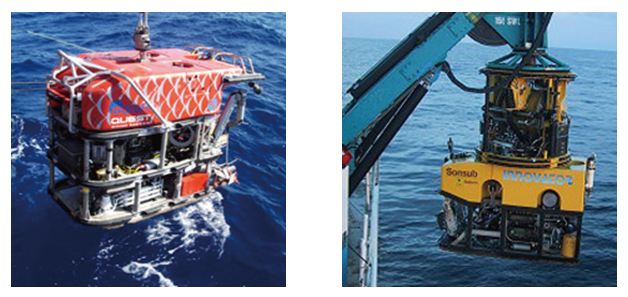
简介
由于多路经,卫星参数等因素的影响,单纯的GPS输出数据会发生跳动,Survey+通过惯性传感器陀螺仪和加速度计来计算位置速度、方位姿态等测量数据,依靠传感器本身,没有跳动。外接的GPS用于消除惯性器件漂移而带来的稳定性误差。
即使GPS信号丢失,Survey+仍然能通过内部的惯性传感器来继续输出数据。可以通过轮速计等装置,校正位置漂移,在2分钟正常行驶的条件下,位置误差不会大于5米。
Survey+不仅能提高位置和速度性能指标,同时也能增强航向和姿态性能指标,而三轴的角度数据精度对于校正机载/车载摄相机或者激光雷达误差来说非常重要。
选用双天线设计的Survey+产品,提高了航向精度,使用双天线解决方案,在低动态条件下,能得到更高的航向精度和稳定性,比如飞机在平飞的条件下。在长航线飞行时,能输出恒稳定的航向精度,在该条件下,单纯使用惯性会降低航向精度。
Survey+系列产品通过RS232,Ethernet来输出数据。
Survey+系列产品内部包含3个军工级角度率陀螺仪,3个伺服军工级加速度计,一体化设计,内部集成了高精度的GNSS。
配置软件可轻易的改变安装角,移动测量点至虚拟位置。24阶卡尔曼滤波,自动校正天线、安装位置等引起的误差,安装起来非常简单,不像其它公司的惯导,需要精确的对准和对安装位置误差要求很高。
内部集成了2GB的存储卡,可单独运行。对于事后处理,数据可以导出为ASCII文本格式,方便其它软件加载。产品的数据输出延时时间非常小,可以不用等待GPS的测量数据,在0.5s的GPS输入信号延时的情况下,RT产品仍然能够校正它。
内部的ADC转换,20bit分辨率,加速度测量的分辨率是0.12mm/s²(12
μg)。ADC转换模拟量输入,采用圆锥/划船(coning/sculling)运动补偿算法来避免信号的混淆。
内部的处理包括捷联算法(采用WGS-84地球坐标),卡尔曼滤波和飞行中校准等算法。内部的英特尔奔腾级处理器运行QNX实时操作系统,保证了数据的稳定、可靠和实时性。
单天线 vs 双天线
Survey+产品内部的高级算法可以使路面车辆客户通过单天线来满足绝大部分的应用需求。航向锁定和高级侧滑角特性可以使其在静止和低动态环境下维持精确的航向值。机载或者船载之类的低动态应用场合可以使用双天线系统来维持高精度的航向值。
在单天线和双天线的数据手册中,某些条件下,二者的航向精度是相同的。然而,双天线产品可以在各种条件下提供稳定的航向值,而单天线产品在机载/船载/低动态车载条件下,航向精度会有所下降。
双天线的航向精度
在理想的情况下,空阔环境,双天线系统,天线的基线长度,每增加1m,可以得到0.3degree(1σ)的精度。建议基线长度是2m,在静止的条件下,可以得到0.15degree的航向精度。在动态条件下,航向精度可以得到提高,因为此时的多路经误差处于变化之中,算法可以把该误差给滤掉。
基线的长度可以大于2m,但是需要特殊的校准过程。在5m的基线长度下,可以达到0.05degree的航向精度。天线安装误差可能会影响更高的航向精度。
数据手册中给出的航向精度比0.15degree要高,在动态环境下,或者用于陆地车辆,实际的航向精度要比通过双天线所能获得的值要好。在静止时,空阔的环境下,2m的基线长度只能得到0.15degree(RMS)的航向精度。
|
Survey+ GNSS/INS组合导航系统 |
|
单天线,100Hz输出 |
Survey+ |
|
|
|
|
|
单天线,250Hz输出 |
Survey+ 250 |
|
|
|
|
|
双天线,100Hz输出 |
|
Survey+2 |
|
|
|
|
双天线,250Hz输出 |
|
Survey+2 250 |
|
|
|
|
GNSS类型 |
GPS L1 L2,
GLONASS L1L2(可选) |
GPS L1 L2,
GLONASS L1L2(可选) |
|
|
|
|
位置精度 |
1.5 m SPS
0.6 m SBAS
0.4 m DGPS
0.02 m RTK |
1.5 m SPS
0.6 m SBAS
0.4 m DGPS
0.02 m RTK |
|
|
|
|
速度精度 |
0.05 km/h RMS |
0.05 km/h RMS |
|
|
|
|
俯仰/横滚 |
0.03° 1σ |
0.03° 1σ |
|
|
|
|
航向 |
单天线
0.1°
1σ
双天线
0.05° 1σ |
单天线
0.1°
1σ
双天线
0.05° 1σ |
|
|
|
|
升沉 |
10cm或5% |
10cm或5% |
|
|
|
|
Survey+ GNS/INS组合导航系统 |
|
加速度 |
|
物理及环境指标 |
|
|
-偏差 |
10 mm/s² 1σ |
计算延时 |
3.5 ms |
|
-非线性 |
0.01% 1σ |
电源 |
9-18 V
d.c.
15W |
|
-比例因子 |
0.1% 1σ |
尺寸(mm) |
234 x 120 x 80 (不含连接头) |
|
-量程 |
100/300 m/s² |
重量-单天线 |
2.2 kg |
|
角速度 |
|
重量-双天线 |
2.4 kg |
|
-偏差 |
2 deg/hr 1σ |
工作温度 |
–10 to 50°C |
|
-随机游走 |
0.2 deg/√hr 1σ |
振动 |
0.1 g²/Hz 5-500 Hz |
|
-比例因子 |
0.2% 1σ |
冲击 |
100G, 11ms |
|
-量程 |
100/300 °/s |
内部存储 |
2GB |
|
|
|
|
简介
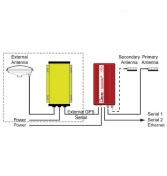
Inertial+导航系统能提供高性价比GPS/INS测量系统。它接受外部NMEA格式的GPS接收机信号,与内部的惯性产品深组合处理,同样以NMEA格式输出融合后的稳定的数据。可选其它数据输入格式。
由于多路经,卫星参数等因素的影响,单纯的GPS输出数据会发生跳动,inertial+通过惯性传感器陀螺仪和加速度计来计算位置速度、方位姿态等测量数据,依靠传感器本身,没有跳动。外接的GPS用于消除惯性器件漂移而带来的稳定性误差。
即使GPS信号丢失,inertial+仍然能通过内部的惯性传感器来继续输出数据。可以通过轮速计等装置,校正位置漂移,在2分钟正常行驶的条件下,位置误差不会大于5米。
Inertial+不仅能提高位置和速度性能指标,同时也能增强方位和姿态性能指标,而三轴的角度数据精度对于校正机载/车载摄相机或者激光雷达误差来说非常重要。
Inertial+2采用双天线设计,提高了航向精度,使用双天线解决方案,在低动态条件下,能得到更高的航向精度和稳定性,比如飞机在平飞的条件下。在长航线飞行时,能输出恒稳定的航向精度,在该条件下,单纯使用惯性会降低航向精度。
在某些条件下,GPS信号非常弱,需要花费大量的时间去处理GPS数据,有时还会丢失地理参考数据。通过使用inertial+增强技术,能得到高精度、恒稳定的数据。
Inertia+内部包含3个军工级角度率陀螺仪,3个伺服军工级加速度计,一体化设计,内部的低成本GPS用于时间对准或者航向增强(双天线)。
配置软件可轻易的改变安装角,移动测量点至虚拟位置,选用GPS类型等。24阶卡尔曼滤波,自动校正天线、安装位置等引起的误差,安装起来非常简单,不像其它公司的惯导,需要精确的对准和对安装位置误差要求很高。
内部集成了2GB的存储卡,可单独运行。对于事后处理,数据可以导出为ASCII文本格式,方便其它软件加载。产品的数据输出延时时间非常小,可以不用等待GPS的测量数据,在0.5s的GPS输入信号延时的情况下,inertial+仍然能够校正它。
内部的ADC转换,20bit分辨率,加速度测量的分辨率是0.12mm/s²(12
μg)。ADC转换模拟量输入,采用圆锥/划船(coning/sculling)运动补偿算法来避免信号的混淆。
内部的处理包括捷联算法(采用WGS-84地球坐标),卡尔曼滤波和飞行中校准等算法。内部的英特尔奔腾级处理器运行QNX实时操作系统,保证了数据的稳定、可靠和实时性。
单天线 vs 双天线
Inertial+2拥有双天线,而Inertial+只有单天线。对于Inertial+2,外部输入的GPS信号用于提供高精度的位置数据,内部的2个GPS接收机用于时间对准和航向解算。
Inertial+内部的高级算法可以使路面车辆客户通过单天线来满足绝大部分的应用需求。航向锁定和高级侧滑角特性可以使inertial+在静止和低动态环境下维持精确的航向值。机载或者船载之类的应用可以使用双天线系统来维持高精度的航向值。
在单天线和双天线的数据手册中,某些条件下,二者的航向精度是相同的。然而,双天线产品可以在各种条件下提供稳定的航向值,而单天线产品在机载/船载/低动态车载条件下,航向精度会有所下降。
双天线的航向精度
在理想的情况下,空阔环境,双天线inertial+2系统,天线的基线长度,每增加1m,可以得到0.3degree(1σ)的精度。建议基线长度是2m,在静止的条件下,可以得到0.15degree的航向精度。在动态条件下,航向精度可以得到提高,因为此时的多路经误差处于变化之中,算法可以把该误差给滤掉。
基线的长度可以大于2m,但是需要特殊的校准过程。在5m的基线长度下,可以达到0.05degree的航向精度。天线安装误差可能会影响更高的航向精度。
数据手册中给出的航向精度比0.15degree要高,在动态环境下,或者用于陆地车辆,实际的航向精度要比通过双天线所能获得的值要好。在静止时,空阔的环境下,2m的基线长度只能得到0.15degree(RMS)的航向精度。
性能参数
|
Inertial+/Inertial+2
GPS/INS组合导航系统 |
|
单天线
100/250Hz输出 |
Inertial+ |
|
双天线
100/250Hz输出 |
Inertial+2 |
|
参数 |
-RT2 |
-RT20 |
-DGPS |
-SPS |
-ISPS (内部
GPS) |
|
GNSS类型 |
L1/L2
Kinematic |
L1 Kinematic
OmniStar HP |
Differential GPS
OmniStar VBS |
SPS |
SPS |
|
位置精度 |
2cm 1σ |
20cm (10cm for HP) |
0.4m CEP |
1.8m CEP |
3.0m CEP |
|
速度精度 |
0.05 km/h RMS |
0.08 km/h RMS |
0.1 km/h RMS |
0.1 km/h RMS |
0.2 km/h RMS |
|
俯仰/横滚 |
0.03° 1σ |
0.04° 1σ |
0.05° 1σ |
0.05° 1σ |
0.15° 1σ |
|
航向 |
0.1° 1σ |
0.1° 1σ |
0.1° 1σ |
0.1° 1σ |
0.2° 1σ |
|
跟踪角
(at 50km/h) |
0.07° RMS |
0.1° RMS |
0.15° RMS |
0.15° RMS |
0.25° RMS |
|
加速度 |
|
|
-偏差 |
10 mm/s² 1σ |
|
-非线性 |
0.01% 1σ |
|
-比例因子 |
0.1% 1σ |
|
-量程 |
100/300 m/s² |
|
角速度 |
|
|
-偏差 |
2 deg/hr 1σ |
|
-随机游走 |
0.2 deg/√hr
1σ |
|
-比例因子 |
0.1% 1σ |
|
-量程 |
100/300 °/s |
|
物理及环境指标 |
|
|
计算延时 |
3.9 ms |
|
电源 |
9-18 V
d.c.
15W |
|
尺寸(mm) |
234 x 120 x 76 (不含连接头) |
|
重量 |
2.3 kg |
|
工作温度 |
–10 to 50°C |
|
振动 |
0.1 g²/Hz 5-500 Hz |
|
冲击 |
100G, 11ms |
|
内部存储 |
2GB |
注:
- GPS天线的温度范围为–55
to 85°C。
- Inertial+的位置精度取决于外部GPS的精度,有些厂家标注在L1/L2条件下可以达到1cm的精度,此时Inertial+亦可以达到该精度,不过在动态环境下,GPS往往达不到这么高的精度。
- Inertial+2在只接一个天线的情况下,等同于Inertial+。
-
双天线的标准基线长度是2m,更长的基线可以获得更高航向精度,在5m基线长度下可以获得0.05度的航向,请联系我们获得更多支持。
<!--[if !vml]-->
|
|
|
|
无人飞行器,无人车辆往往需要体积小,精度高的GPS/INS组合导航系统。我们设计的xNAV系列产品即使在恶劣的环境下,亦能提供高性能的位置、航向和姿态数据。
在小体积和高性能方面,xNAV重量仅仅300多克,体积比一个鼠标稍大些。填补了传统的轻重量-低性能,高重量-高性能产品之间的空白。对于UAV,在1000米的高度,xNAV可提供超过1m的像素精度,而不会增加太多重量。
集深耦合卡尔曼滤波技术,差分GPS,GPS航向以及惯性导航数据于一体,在GPS丢失的情况下仍可连续输出导航数据。xNAV200可以达到0.9米的位置精度,xNAV250可以达到0.02米的位置精度,结合正向-反向后处理,轮速计等增强性能,最大程度上降低GPS丢失时的漂移。
内部的双天线GPS航向精度为0.15度,在低动态或长时间平飞的情况下没有漂移,远远超过采用磁航向技术的产品。
内部的存储卡可以记录24小时的原始数据,用于事后软件处理。实时输出包括NMEA
GPGGA和1PPS用于同步其它传感器数据。事件触发输入用于精确记录相机快门或其它外部事件,并从100Hz实时数据中插补出触发时刻的数据,非常易于与相机和激光雷达等设备的集成使用。
|
xNAV GPS/INS组合导航系统 |
|
型号 |
xNAV200 |
xNAV500 |
|
GNSS类型 |
L1 |
L1 |
|
位置精度CEP |
SPS 1.8m
DGPS 0.9m |
SPS 1.8m
DGPS 0.9m |
|
速度精度
RMS |
0.1 km/h |
0.1 km/h |
|
俯仰/横滚
1σ |
0.05° |
0.05° |
|
航向1σ |
2m基线:
0.15°
4m基线:
0.06 |
2m基线:
0.15°
4m基线:
0.06 |
|
升沉1σ |
10cm or 5% |
10cm or 5% |
|
实时输出 |
否 |
是 |
|
双天线 |
是 |
是 |
|
加速度 |
|
|
-偏差稳定性 |
3.75 mg |
|
-非线性 |
0.05% |
|
-比例因子 |
0.02% |
|
-随机游走 |
0.05 m/s/√hr |
|
-轴对准 |
0.02 deg |
|
-量程 |
50 m/s² |
|
角速度 |
|
|
-偏差稳定性 |
2 deg/hr |
|
-非线性 |
0.1% |
|
-比例因子 |
0.05% |
|
-随机游走 |
0.2 deg/√hr |
|
-比例因子 |
0.1% 1σ |
|
-量程 |
300 °/s |
|
物理及环境指标 |
|
|
电源 |
10-31 VDC, 7W |
|
尺寸(mm) |
132 x 77 x 36 (不含连接头) |
|
重量 |
0.376 kg |
|
工作温度 |
–30 to 70°C |
|
振动 |
0.002 g²/Hz 5-500 Hz |
|
冲击 |
1000G |
|
防护等级 |
IP65 |
|
内部存储 |
4GB |
|
|
|
|
SUBLOCUS
惯性导航系统集成了三个光纤陀螺仪和三个MEMS加速度计,GNSS卫星导航系统,压力深度计,ADC模数转换,温度传感器,扩展I/O接口等。采用实时操作系统,在高性能数据处理芯片中嵌入特有的数据融合滤波算法,系统能在静态、动态以及冲击振动状态下,均有很好的响应,输出稳定的导航数据。
相比于SUBLOCUS,SUBLOCUS
DVL集成了多普勒流速仪,更适合在水下导航。
由于采用了零偏稳定性0.05deg/h
的光纤陀螺,该陀螺仪能敏感到地球的自转角速率,因而能利用陀螺仪自动寻北的功能。系统的陀螺罗盘功能一直处于打开状态,在没有外部航向辅助的情况下,航向初始化大约需要10
分钟的时间。有外部航向辅助,比如说磁航向的情况下,航向初始化大约需要1
分钟的时间。一旦陀螺罗盘的航向锁定成功,系统将自动使用陀螺罗盘航向。
|
SUBLOCUS
惯性导航系统 |
|
性能指标 |
|
角速率 |
|
|
位置精度
带GPS
(m) |
0.8 |
量程:横滚,
俯仰,
偏航
(°/sec) |
± 490 |
|
位置精度
带DVL
(m) |
0.08%行驶距离 |
噪声密度
(°/s/√Hz) |
0.002 |
|
深度精度
(m) |
0.4 |
非线性
(%FS) |
0.005 |
|
俯仰/横滚精度
(°) |
0.01 |
偏差稳定性
(°/hr) |
0.05 |
|
陀螺寻北精度
(°) |
0.25, secant latitude |
交叉轴误差
(°) |
0.02 |
|
升沉值 |
5 %
或者
0.05 m |
带宽
(Hz) |
440 |
|
角度范围 |
无限制 |
加速度 |
|
|
热启动时间
(sec) |
2 |
量程:
X/Y/Z (g) |
±10 |
|
初次寻北时间
(sec) |
60 |
噪声密度
(ug/√Hz) |
300 |
|
输出更新率
(Hz) |
最大1000 |
非线性
(%FS) |
0.03 |
|
环境指标 |
|
偏差稳定性
(ug) |
50 |
|
工作温度
(°C) |
-40 ~ +75 |
交叉轴误差
(°) |
0.05 |
|
非工作温度
(°C) |
-55 ~ +85 |
带宽
(Hz) |
200 |
|
防护等级 |
IP68 |
磁场计 |
|
|
冲击
(g) |
25 |
量程:(G)
|
8 |
|
电气指标 |
|
噪声密度
(uG/√Hz) |
210 |
|
输入电压
(VDC) |
18
至
50 |
非线性
(%FS) |
0.05 |
|
功耗
(W) |
6W |
交叉轴误差
(°) |
0.05 |
|
输出格式 |
RS-422 / RS-232 |
带宽
(Hz) |
110 |
|
物理指标
|
|
压力深度计 |
|
|
尺寸
(mm) |
170 x 170 x 133 |
量程:(ba)
|
400 |
|
重量
(kg) |
6.4
(空中),
3.9(水下) |
噪声密度
(Pa/√Hz) |
|
|
数据接口 |
ANPP(自定义)
/ NMEA |
偏差稳定性
(Pa/yr) |
|
|
扩展GPIO |
2个,外部速度输入,外部触发输入,1PPS输出等 |
带宽
(Hz) |
10 |
|
|
|
|
SPATIAL 1750FOG
GNSS/INS组合导航系统集成了三个光纤陀螺仪,三个MEMS加速度计,GNSS卫星导航系统,磁场计,气压高度计,ADC模数转换,温度传感器,扩展I/O接口等。采用实时操作系统,在高性能数据处理芯片中嵌入特有的数据融合滤波算法,系统能在静态、动态以及冲击振动状态下,均有很好的响应,输出稳定的导航数据。
支持目前市场上所有的卫星导航系统,包括GPS,
GLONASS,
GALILEO和COMPASS,支持SBAS星基差分。特别是在城市道路中,单纯的GPS已经不能满足连续定位的需求。即使在卫星信号丢失的情况下,它仍然能够通过惯性导航系统来连续输出导航数据。系统中的陀螺和加速度计均经过温度补偿和校正,确保其在全温度范围内的精度。并对陀螺仪进行了g灵敏度校正和补偿,确保其在高动态环境下的性能。
系统具有两个通讯端口,最高1000Hz的导航数据输出。主端口订货时可选RS232或者RS422,辅助端口为RS232。辅助端口可以用来做为差分信号输入,导航数据输入/输出。另有两个通用输入输出(GPIO)接口,可以扩展外部速度输入,外部触发输入,1PPS输出等。
由于采用了零偏稳定性0.05deg/h的光纤陀螺,该陀螺仪能敏感到地球的自转角速率,因而能利用陀螺仪自动寻北的功能。系统的陀螺罗盘功能一直处于打开状态,在没有外部航向辅助的情况下,航向初始化大约需要10分钟的时间。有外部航向辅助,比如说磁航向,的情况下,航向初始化大约需要1分钟的时间。一旦陀螺罗盘的航向锁定成功,系统将自动使用陀螺罗盘航向。
|
SPATIAL FOG GNSS/INS组合导航系统 |
|
性能指标 |
|
角速率 |
|
|
水平位置精度
SPS/SBAS/RTK (m) |
0.8 / 0.5 / 0.01 |
量程:横滚,
俯仰,
偏航
(°/sec) |
± 490 |
|
垂直位置精度
SPS/SBAS/RTK (m) |
1.5 / 0.8 / 0.02 |
噪声密度
(°/s/√Hz) |
0.0002 |
|
速度精度
(m/s) |
0.03 |
非线性
(%FS) |
0.005 |
|
俯仰/横滚
动态精度
(°) |
0.01 |
偏差稳定性
(°/hr) |
0.05 |
|
航向
动态精度
(°) |
0.05 |
交叉轴误差
(°) |
0.02 |
|
角度范围 |
无限制 |
带宽
(Hz) |
440 |
|
热启动时间
(s) |
2 |
加速度 |
|
|
输出更新率
(Hz) |
最大1000 |
量程:
X/Y/Z (g) |
± 10 |
|
|
|
噪声密度
(ug/√Hz) |
300 |
|
|
|
非线性
(%FS) |
0.03 |
|
环境指标 |
|
偏差稳定性
(mg) |
7.5 |
|
工作温度
(°C) |
-40 to +85 |
交叉轴误差
(°) |
0.05 |
|
非工作温度
(°C) |
-55 to +85 |
带宽
(Hz) |
200 |
|
防护等级 |
IP68 |
磁场计 |
|
|
冲击
(g) |
25 |
量程:(G)
|
2 |
|
电气指标 |
|
噪声密度
(uG/√Hz) |
210 |
|
输入电压
(VDC) |
9
至
36 |
非线性
(%FS) |
0.05 |
|
功耗
(W) |
550 mA @ 12 V
|
交叉轴误差
(°) |
0.05 |
|
输出格式 |
RS422 / RS232 |
带宽
(Hz) |
110 |
|
物理指标
|
|
高度计 |
|
|
尺寸
(mm) |
90 x 90 x 96 |
量程:(kPa)
|
30-110 |
|
重量
(g) |
860 |
噪声密度
(Pa/√Hz) |
0.56 |
|
数据接口 |
ANPP(自定义) |
偏差稳定性
(Pa/yr) |
100 |
|
扩展GPIO |
2个,外部速度输入,外部触发输入,1PPS输出等 |
带宽
(Hz) |
32 |
|
|
|
|
Spatial NAV982
双天线GNSS/INS组合导航系统集成了三个MEMS陀螺仪和三个MEMS加速度计,GNSS卫星导航系统,磁场计,气压高度计,ADC模数转换,温度传感器,扩展I/O接口等。采用实时操作系统,在高性能数据处理芯片中嵌入特有的数据融合滤波算法,系统能在静态、动态以及冲击振动状态下,均有很好的响应,输出稳定的导航数据。
系统内置Trimble公司BD982
双天线GNSS卫星导航系统,支持包括GPS,
GLONASS, GALILEO和Beidou在内的卫星系统,支持SBAS星基差分和RTK差分。特别是在城市道路中,单纯的GPS已经不能满足连续定位的需求。即使在卫星信号丢失的情况下,NAV982仍然能够通过惯性导航系统来连续输出导航数据。系统中的MEMS陀螺和加速度计均经过温度补偿和校正,确保其在全温度范围内的精度。并对陀螺仪进行了g灵敏度校正和补偿,确保其在高动态环境下的性能。
系统具有两个通讯端口,最高800Hz导航数据输出。主端口订货时可选RS232或者USB,辅助端口为RS232,辅助端口可以用来做为差分信号输入,ANPP输入/输出,外部RTK
GNSS输入。另有两个通用输入输出(GPIO)接口,可以扩展外部速度输入,外部触发输入,1PPS输出等。
航向来源可以选择使用速度航向,磁航向,或者输入外部航向;也可以输入外部位置、速度数据,对于像机器人/无人飞行器室内同步地图构建(SLAM)时,可以对激光雷达生成的导航数据起到稳定作用。
|
Spatial NAV982 GNSS/INS组合导航系统 |
|
性能指标 |
|
角速率 |
|
|
水平位置精度
SPS/DGNSS/RTK (m) |
1.2 / 0.5 / 0.01 |
量程:
横滚,
俯仰,
偏航
(°/sec) |
± 250 / 500 / 2000
|
|
垂直位置精度
SPS/DGNSS/RTK (m) |
2.0 / 0.8 / 0.02 |
噪声密度
(°/s/√Hz) |
0.008 |
|
速度精度
(m/s) |
0.007 |
非线性
(%FS) |
0.05 |
|
俯仰/横滚
静态精度
(°) |
0.2 |
偏差稳定性
(°/hr) |
3 |
|
俯仰/横滚
动态精度
(°) |
0.2 |
交叉轴误差
(°) |
0.05 |
|
航向静态精度
(°) |
0.1 (1m基线) |
带宽
(Hz) |
400 |
|
航向动态精度
(°) |
0.1 (1m基线) |
加速度 |
|
|
角度范围 |
无限制 |
量程:
X/Y/Z (g) |
±2 / 4 / 16 |
|
升沉值 |
5 %
或者
0.05 m |
噪声密度
(ug/√Hz) |
150 |
|
输出更新率
(Hz) |
最大1000 |
非线性
(%FS) |
0.05 |
|
环境指标 |
|
偏差稳定性
(ug) |
20 |
|
工作温度
(°C) |
-40 ~ +85 |
交叉轴误差
(°) |
0.05 |
|
非工作温度
(°C) |
-55 ~ +85 |
带宽
(Hz) |
400 |
|
防护等级 |
IP60 |
磁场计 |
|
|
冲击
(g) |
2000 |
量程:(G)
|
2 / 4 / 8 |
|
电气指标 |
|
噪声密度
(uG/√Hz) |
210 |
|
输入电压
(VDC) |
4.2
至
17 |
非线性
(%FS) |
0.05 |
|
功耗
(W) |
1000 mA @ 12 V
|
交叉轴误差
(°) |
0.05 |
|
输出格式 |
RS-232 |
带宽
(Hz) |
110 |
|
物理指标
|
|
高度计 |
|
|
尺寸
(mm) |
142 x 104 x 41 |
量程:(kPa)
|
10-120 |
|
重量
(g) |
500 |
噪声密度
(Pa/√Hz) |
0.56 |
|
数据接口 |
ANPP(自定义) |
偏差稳定性
(Pa/yr) |
100 |
|
扩展GPIO |
2个,外部轮速计输入,外部触发输入,1PPS输出等 |
带宽
(Hz) |
50 |
|
|
|
|
NAV100
GNSS/INS组合导航系统集成了三个MEMS陀螺仪,三个MEMS加速度计,GNSS卫星导航系统,磁场计,气压高度计,ADC模数转换,温度传感器,扩展I/O接口等。采用实时操作系统,在高性能数据处理芯片中嵌入特有的数据融合滤波算法,系统能在静态、动态以及冲击振动状态下,均有很好的响应,输出稳定的姿态数据。
支持目前市场上所有的卫星导航系统,包括GPS,
GLONASS,
GALILEO和COMPASS,支持SBAS星基差分。特别是在城市道路中,单纯的GPS已经不能满足连续定位的需求。即使在卫星信号丢失的情况下,它仍然能够通过惯性导航系统来连续输出导航数据。系统中的陀螺和加速度计均经过温度补偿和校正,确保其在全温度范围内的精度。并对陀螺仪进行了g灵敏度校正和补偿,确保其在高动态环境下的性能。
系统具有两个通讯端口,最高800Hz导航数据输出。主端口订货时可选RS232或者USB,辅助端口为RS232,辅助端口可以用来做为差分信号输入,ANPP输入/输出,外部RTK
GNSS输入。另有两个通用输入输出(GPIO)接口,可以扩展外部速度输入,外部触发输入,1PPS输出等。
航向来源可以选择使用速度航向,磁航向,或者输入外部航向;也可以输入外部位置、速度数据,对于像机器人/无人飞行器室内同步地图构建(SLAM)时,可以对激光雷达生成的导航数据起到稳定作用。
|
NAV100 GNSS/INS组合导航系统 |
|
性能指标 |
|
角速率 |
|
|
水平位置精度
SPS/DGNSS (m) |
2.0 / 0.6 |
量程:横滚,
俯仰,
偏航
(°/sec) |
± 250 / 500 / 2500
|
|
垂直位置精度
SPS/DGNSS (m) |
3.0 / 1.0 |
噪声密度
(°/s/√Hz) |
0.005 |
|
速度精度
(m/s) |
0.05 |
非线性
(%FS) |
0.05 |
|
俯仰/横滚
静态精度
(°) |
0.2 |
偏差稳定性
(°/hr) |
<18 |
|
俯仰/横滚
动态精度
(°) |
0.6 |
交叉轴误差
(°) |
0.05 |
|
航向静态精度
(°) |
0.5 |
带宽
(Hz) |
256 |
|
航向动态精度
(°) |
1 |
加速度 |
|
|
角度范围 |
无限制 |
量程:
X/Y/Z (g) |
±2 / 4 / 16 |
|
热启动时间
(ms) |
500 |
噪声密度
(ug/√Hz) |
400 |
|
输出更新率
(Hz) |
最大800 |
非线性
(%FS) |
0.05 |
|
环境指标 |
|
偏差稳定性
(ug) |
60 |
|
工作温度
(°C) |
-40 to +85 |
交叉轴误差
(°) |
0.05 |
|
非工作温度
(°C) |
-55 to +85 |
带宽
(Hz) |
256 |
|
防护等级 |
IP64 |
磁场计 |
|
|
冲击
(g) |
2000 |
量程:(G)
|
2 / 4 / 8 |
|
电气指标 |
|
噪声密度
(uG/√Hz) |
210 |
|
输入电压
(VDC) |
4.2
至
17 |
非线性
(%FS) |
0.05 |
|
功耗
(W) |
100 mA @ 5 V
|
交叉轴误差
(°) |
0.05 |
|
输出格式 |
RS-232或USB |
带宽
(Hz) |
75 |
|
物理指标
|
|
高度计 |
|
|
尺寸
(mm) |
30 x 30 x 24 |
量程:(kPa)
|
30-110 |
|
重量
(g) |
30 |
噪声密度
(Pa/√Hz) |
0.56 |
|
数据接口 |
ANPP(自定义) |
偏差稳定性
(Pa/yr) |
100 |
|
扩展GPIO |
2个,外部速度输入,外部触发输入,1PPS输出等 |
带宽
(Hz) |
32 |
|
|
|
|
AHRS100
姿态方位参考系统集成了三个MEMS陀螺仪和三个MEMS加速度计,磁场计,
ADC模数转换,温度传感器,扩展I/O接口等。采用实时操作系统,在高性能数据处理芯片中嵌入特有的数据融合滤波算法,系统能在静态、动态以及冲击振动状态下,均有很好的响应,输出稳定的姿态数据。
支持外部GNSS信号输入,外部位置、速度和航向输入等。外部的GNSS信息可以校正行驶过程中的加减速,转向等带来的角度误差,同时可以自动校正内部的全球磁场模型。系统中的MEMS陀螺和加速度计均经过温度补偿和校正,确保其在全温度范围内的精度。并对陀螺仪进行了g灵敏度校正和补偿,确保其在高动态环境下的性能。
系统具有两个通讯端口,主端口订货时可选RS232或者USB,辅助端口为RS232,辅助端口可以用来做为GNSS信号输入,ANPP输入/输出等。另有两个通用输入输出(GPIO)接口,可以扩展外部触发输入等。
航向来源可以选择使用速度航向,磁航向,或者输入外部航向,对于像机器人室内同步地图构建(SLAM)时,可以对激光雷达生成的航向数据起到稳定作用。
|
AHRS100
姿态方位参考系统 |
|
性能指标 |
|
角速率 |
|
|
俯仰/横滚
静态精度
(°) |
0.2 |
量程:横滚,
俯仰,
偏航
(°/sec) |
± 250 / 500 / 2500
|
|
俯仰/横滚
动态精度
(°) |
0.6 |
噪声密度
(°/s/√Hz) |
0.005 |
|
航向静态精度
(°) |
0.5 |
非线性
(%FS) |
0.05 |
|
航向动态精度
(°) |
1 |
偏差稳定性
(°/hr) |
<18 |
|
角度范围 |
无限制 |
交叉轴误差
(°) |
0.05 |
|
热启动时间
(ms) |
500 |
带宽
(Hz) |
256 |
|
输出更新率
(Hz) |
最大800 |
加速度 |
|
|
环境指标 |
|
量程:
X/Y/Z (g) |
±2 / 4 / 16 |
|
工作温度
(°C) |
-40 to +85 |
噪声密度
(ug/√Hz) |
400 |
|
非工作温度
(°C) |
-55 to +85 |
非线性
(%FS) |
0.05 |
|
防护等级 |
IP64 |
偏差稳定性
(ug) |
60 |
|
冲击
(g) |
2000 |
交叉轴误差
(°) |
0.05 |
|
电气指标 |
|
带宽
(Hz) |
256 |
|
输入电压
(VDC) |
4.0
至
36 |
磁场计 |
|
|
功耗
(W) |
65 mA @ 5 V |
量程:(G)
|
2 / 4 / 8 |
|
输出接口 |
RS-232或USB |
噪声密度
(uG/√Hz) |
210 |
|
物理指标
|
|
非线性
(%FS) |
0.05 |
|
尺寸
(mm) |
30 x 30 x 24 |
交叉轴误差
(°) |
0.05 |
|
重量
(g) |
25 |
带宽
(Hz) |
75 |
|
数据接口 |
ANPP(自定义) |
|
|
|
扩展GPIO |
2个,接外部触发输入等 |
|
|
|
|
|
LMRK10/20/21/30/40 AHRS
系列高性能姿态方位参考系统是一款由MEMS角速度陀螺,加速度传感器,磁场计和气压高度计组成,在全温范围内对零偏,比例因子,轴对准和g灵敏度等进行了补偿。
可以选用GPS辅助姿态方位参考系统,或者输入外部速度信号,能有效抑制线加速度和转向时离心力带来的角度误差。
它们的显著特点是它的低噪音、优秀的全温零偏性能、低功耗、优秀的G-灵敏度性能和轻重量,抗恶劣环境设计,能够抵挡诸如商业飞机环境上的振动和冲击。无移动部件,长寿命,角速度输出与偏移等级无关。适用于商业级或者战术级应用场合。
|
|
LandMark为数字量输出,MRM为模拟量输出 |
|
系列 |
LMRK/MRM 10 |
LMRK/MRM 20 |
LMRK/MRM 21 |
LMRK/MRM 30 |
LMRK/MRM 40 |
|
规格 |
75°/sec-2g |
75°/sec-2g |
100°/sec-2g |
100°/sec-2g |
100°/sec-2g |
|
陀螺-偏差
(运行稳定性)
°/hr |
25 |
15 |
10 |
8 |
6 |
|
加计-偏差
(运行稳定性)
mg |
0.1 |
0.02 |
0.1 |
0.02 |
0.02 |
|
|
|
|
|
|
|
|
陀螺-偏差(全温)
°/sec |
0.1 |
0.05 |
0.05 |
0.03 |
0.03 |
|
加计-偏差(全温)
mg |
3 |
1 |
2 |
0.5 |
0.5 |
|
|
|
|
|
|
|
|
分辨率
°/sec |
0.007 |
0.005 |
0.01 |
0.002 |
0.001 |
|
陀螺-噪声
°/sec/√Hz |
0.014 |
0.01 |
0.004 |
0.0035 |
0.002 |
|
陀螺-噪声
°/√Hour |
0.594 |
0.424 |
0.17 |
0.148 |
0.085 |
|
|
|
|
|
|
|
|
加计-噪声
mg/√Hz |
0.07 |
0.05 |
0.25 |
0.04 |
0.04 |
|
加计-噪声
meters/sec/√Hr |
0.029 |
0.021 |
0.104 |
0.017 |
0.015 |

|
姿态方位参考系统 |
|
型号 |
LMRK10 |
LMRK20 |
LMRK21 |
LMRK30 |
LMRK40 |
|
供电电源 |
+3.1~5.5VDC |
+3.1~5.5VDC |
+3.1~5.5VDC |
+6.0~36VDC |
+3.1~5.5VDC |
|
功耗-带GPS
功耗-不带GPS |
3.3V, 825mW
3.3V, 650mW |
3.3V, 825mW
3.3V, 650mW |
NA
3.3V, 550mW |
12V, 3000mW
12V, 2300mW |
3.3V, 825mW
3.3V, 650mW |
|
角速度(下述指标对应最小量程) |
|
|
|
|
|
量程
°/sec |
±75/150/300 |
±75/150/300 |
±100 / 300 |
±100/175/300 |
±75/150/300 |
|
偏差
(运行稳定性)
°/hr |
25 |
15 |
10 |
8 |
6 |
|
偏差(全温)
°/sec |
<0.1 |
<0.05 |
<0.05 |
<0.03 |
<0.03 |
|
分辨率
°/sec |
0.007 |
0.005 |
0.01 |
0.002 |
0.001 |
|
随机游走
°/sec/√Hz |
0.014 |
0.01 |
0.004 |
0.0035 |
0.002 |
|
加速度(下述指标对应最小量程) |
|
|
|
|
|
量程
g |
±2, 10 |
±2, 10 |
±6, 10 |
±2, 6, 10 |
±2, 10 |
|
偏差
(运行稳定性)
mg |
0.1 |
0.02 |
0.1 |
0.02 |
0.02 |
|
偏差(全温)
mg |
<3 |
<1 |
<2 |
<0.5 |
<0.5 |
|
分辨率
mg |
0.025 |
0.025 |
0.12 |
0.02 |
0.02 |
|
随机游走
mg/√Hz |
0.07 |
0.05 |
0.25 |
0.04 |
0.04 |
|
系统性能 |
|
|
|
|
|
|
比例因子误差(全温) |
≤0.2% |
≤0.1% |
≤0.1% |
≤0.08% |
≤0.1% |
|
g-灵敏度 |
<0.03°/sec/g |
<0.02°/sec/g |
<0.02°/sec/g |
<0.01°/sec/g |
<0.01°/sec/g |
|
轴未对准 |
1mrad |
|
|
|
|
|
航向角度(静态) |
±0.5° |
|
|
|
|
|
俯仰/横滚角度(静态) |
±0.25° |
|
|
|
|
|
气压高度 |
±3m |
|
|
|
|
|
GPS精度,更新率 |
±2.5m CEP, 5Hz位置更新 |
NA |
|
|
|
GPS启动时间(冷/热) |
30sec / 1 sec |
NA |
|
|
|
温度 |
工作:-40°C
to +85°C
非工作:-55°C
to +85°C |
|
|
数据接口及更新率 |
RS485, 100Hz |
|
|
|
|
传感器带宽 |
100Hz
,内置温度传感器 |
|
|
|
|
启动时间(惯性) |
<0.65 sec
在100Hz |
|
|
|
|
冲击 |
500g,
任意轴30msec
1/2 sine |
|
|
|
|
工作振动 |
6g RMS (20Hz to 2KHz) |
|
|
|
|
重量(带GPS)
重量(不带GPS) |
160 g
110 g |
160 g
110 g |
NA
58 g |
445 g
405 g |
160 g
110 g |
|
尺寸(带GPS)
尺寸(不带GPS) |
4.5x5.0x4.78
5.0x4.5x3.2 |
4.5x5.0x4.78
5.0x4.5x3.2 |
NA
2.54x2.54x2.54 |
7.62x7.8x6.05
7.62x7.8x5.72 |
4.5x5.0x4.78
5.0x4.5x3.2 |
|
|
|
|
LMRK10/20/21/30/40 VG
系列高性能垂直陀螺系统是一款由MEMS角速度陀螺,加速度传感器组成,GPS和气压高度计(带GPS的型号)在全温范围内对零偏,比例因子,轴对准和g灵敏度等进行了补偿。
可以选用GPS辅助垂直陀螺系统,或者输入外部速度信号,有效抑制线加速度和转向离心力带来的角度误差。
它们的显著特点是它的低噪音、优秀的全温零偏性能、低功耗、优秀的G-灵敏度性能和轻重量,抗恶劣环境设计,能够抵挡诸如商业飞机环境上的振动和冲击。无移动部件,长寿命,角速度输出与偏移等级无关。适用于商业级或者战术级应用场合。
|
|
LandMark为数字量输出,MRM为模拟量输出 |
|
系列 |
LMRK/MRM 10 |
LMRK/MRM 20 |
LMRK/MRM 21 |
LMRK/MRM 30 |
LMRK/MRM 40 |
|
规格 |
75°/sec-2g |
75°/sec-2g |
100°/sec-2g |
100°/sec-2g |
100°/sec-2g |
|
陀螺-偏差 (运行稳定性)
°/hr |
25 |
15 |
10 |
8 |
6 |
|
加计-偏差 (运行稳定性)
mg |
0.1 |
0.02 |
0.1 |
0.02 |
0.02 |
|
|
|
|
|
|
|
|
陀螺-偏差(全温) °/sec |
0.1 |
0.05 |
0.05 |
0.03 |
0.03 |
|
加计-偏差(全温) mg |
3 |
1 |
2 |
0.5 |
0.5 |
|
|
|
|
|
|
|
|
分辨率 °/sec |
0.007 |
0.005 |
0.01 |
0.002 |
0.001 |
|
陀螺-噪声 °/sec/√Hz |
0.014 |
0.01 |
0.004 |
0.0035 |
0.002 |
|
陀螺-噪声 °/√Hour |
0.594 |
0.424 |
0.17 |
0.148 |
0.085 |
|
|
|
|
|
|
|
|
加计-噪声 mg/√Hz |
0.07 |
0.05 |
0.25 |
0.04 |
0.04 |
|
加计-噪声 meters/sec/√Hr |
0.029 |
0.021 |
0.104 |
0.017 |
0.015 |
|
垂直陀螺系统 |
|
型号 |
LMRK10 |
LMRK20 |
LMRK21 |
LMRK30 |
LMRK40 |
|
供电电源 |
+3.1~5.5VDC |
+3.1~5.5VDC |
+3.1~5.5VDC |
+6.0~36VDC |
+3.1~5.5VDC |
|
功耗-带GPS
功耗-不带GPS |
3.3V, 825mW
3.3V, 430mW |
3.3V, 825mW
3.3V, 430mW |
NA
3.3V, 430mW |
12V, 3000mW
12V, 2200mW |
3.3V, 825mW
3.3V, 430mW |
|
角速度(下述指标对应最小量程) |
|
|
|
|
|
量程
°/sec |
±75/150/300 |
±75/150/300 |
±100 / 300 |
±100/175/300 |
±75/150/300 |
|
偏差
(运行稳定性)
°/hr |
25 |
15 |
10 |
8 |
6 |
|
偏差(全温)
°/sec |
<0.1 |
<0.05 |
<0.05 |
<0.03 |
<0.03 |
|
分辨率
°/sec |
0.007 |
0.005 |
0.01 |
0.002 |
0.001 |
|
随机游走
°/sec/√Hz |
0.014 |
0.01 |
0.004 |
0.0035 |
0.002 |
|
加速度(下述指标对应最小量程) |
|
|
|
|
|
量程
g |
±2, 10 |
±2, 10 |
±6, 10 |
±2, 6, 10 |
±2, 10 |
|
偏差
(运行稳定性)
mg |
0.1 |
0.02 |
0.1 |
0.02 |
0.02 |
|
偏差(全温)
mg |
<3 |
<1 |
<2 |
<0.5 |
<0.5 |
|
分辨率
mg |
0.025 |
0.025 |
0.12 |
0.02 |
0.02 |
|
随机游走
mg/√Hz |
0.07 |
0.05 |
0.25 |
0.04 |
0.04 |
|
系统性能 |
|
|
|
|
|
|
比例因子误差(全温) |
≤0.2% |
≤0.1% |
≤0.1% |
≤0.08% |
≤0.1% |
|
g-灵敏度 |
<0.03°/sec/g |
<0.02°/sec/g |
<0.02°/sec/g |
<0.01°/sec/g |
<0.01°/sec/g |
|
轴未对准 |
1mrad |
|
|
|
|
|
俯仰/横滚角度(静态) |
±0.25° |
|
|
|
|
|
气压高度(带GPS型号) |
±3m |
|
|
|
|
|
GPS精度,更新率 |
±2.5m CEP, 5Hz位置更新 |
NA |
|
|
|
GPS启动时间(冷/热) |
30sec / 1 sec |
NA |
|
|
|
温度 |
工作:-40°C
to +85°C
非工作:-55°C
to +85°C |
|
|
数据接口及更新率 |
RS485, 100Hz |
|
|
|
|
传感器带宽 |
100Hz
,内置温度传感器 |
|
|
|
|
启动时间(惯性) |
<0.65 sec
在100Hz |
|
|
|
|
冲击 |
500g,
任意轴30msec
1/2 sine |
|
|
|
|
工作振动 |
6g RMS (20Hz to 2KHz) |
|
|
|
|
重量(带GPS)
重量(不带GPS) |
160 g
110 g |
160 g
110 g |
NA
30 g |
430 g
388 g |
160 g
110 g |
|
尺寸(带GPS)
尺寸(不带GPS) |
4.5x5.0x4.78
5.0x4.5x3.2 |
4.5x5.0x4.78
5.0x4.5x3.2 |
NA
2.54x2.54x2.54 |
7.62x7.8x6.05
7.62x7.8x5.72 |
4.5x5.0x4.78
5.0x4.5x3.2 |
|
|
|
|
LMRK10/20/21/30/40 IMU
系列高性能惯性测量单元是一款由MEMS角速度陀螺,加速度传感器组成,在全温范围内对零偏,比例因子,轴对准和g灵敏度等进行了补偿。
它们的显著特点是它的低噪音、优秀的全温零偏性能、低功耗、优秀的G-灵敏度性能和轻重量,抗恶劣环境设计,能够抵挡诸如商业飞机环境上的振动和冲击。无移动部件,长寿命,角速度输出与偏移等级无关。适用于商业级或者战术级应用场合。
|
|
LandMark为数字量输出,MRM为模拟量输出 |
|
系列 |
LMRK/MRM 10 |
LMRK/MRM 20 |
LMRK/MRM 21 |
LMRK/MRM 30 |
LMRK/MRM 40 |
|
规格 |
75°/sec-2g |
75°/sec-2g |
100°/sec-2g |
100°/sec-2g |
100°/sec-2g |
|
陀螺-偏差
(运行稳定性)
°/hr |
25 |
15 |
10 |
8 |
6 |
|
加计-偏差
(运行稳定性)
mg |
0.1 |
0.02 |
0.1 |
0.02 |
0.02 |
|
|
|
|
|
|
|
|
陀螺-偏差(全温)
°/sec |
0.1 |
0.05 |
0.05 |
0.03 |
0.03 |
|
加计-偏差(全温)
mg |
3 |
1 |
2 |
0.5 |
0.5 |
|
|
|
|
|
|
|
|
分辨率
°/sec |
0.007 |
0.005 |
0.01 |
0.002 |
0.001 |
|
陀螺-噪声
°/sec/√Hz |
0.014 |
0.01 |
0.004 |
0.0035 |
0.002 |
|
陀螺-噪声
°/√Hour |
0.594 |
0.424 |
0.17 |
0.148 |
0.085 |
|
|
|
|
|
|
|
|
加计-噪声
mg/√Hz |
0.07 |
0.05 |
0.25 |
0.04 |
0.04 |
|
加计-噪声
meters/sec/√Hr |
0.029 |
0.021 |
0.104 |
0.017 |
0.015 |

|
惯性测量单元 |
|
型号 |
LMRK10 |
LMRK20 |
LMRK21 |
LMRK30 |
LMRK40 |
|
供电电源 |
+3.1~5.5VDC |
+3.1~5.5VDC |
+3.1~5.5VDC |
+6.0~36VDC |
+3.1~5.5VDC |
|
功耗 |
3.3V, 430mW |
3.3V, 430mW |
3.3V, 430mW |
12V, 2200mW |
3.3V, 430mW |
|
角速度(下述指标对应最小量程) |
|
|
|
|
|
量程
°/sec |
±75/150/300 |
±75/150/300 |
±100 / 300 |
±100/175/300 |
±75/150/300 |
|
偏差
(运行稳定性)
°/hr |
25 |
15 |
10 |
8 |
6 |
|
偏差(全温)
°/sec |
<0.1 |
<0.05 |
<0.05 |
<0.03 |
<0.03 |
|
分辨率
°/sec |
0.007 |
0.005 |
0.01 |
0.002 |
0.001 |
|
随机游走
°/sec/√Hz |
0.014 |
0.01 |
0.004 |
0.0035 |
0.002 |
|
加速度(下述指标对应最小量程) |
|
|
|
|
|
量程
g |
±2, 10 |
±2, 10 |
±6, 10 |
±2, 6, 10 |
±2, 10 |
|
偏差
(运行稳定性)
mg |
0.1 |
0.02 |
0.1 |
0.02 |
0.02 |
|
偏差(全温)
mg |
<3 |
<1 |
<2 |
<0.5 |
<0.5 |
|
分辨率
mg |
0.025 |
0.025 |
0.12 |
0.02 |
0.02 |
|
随机游走
mg/√Hz |
0.07 |
0.05 |
0.25 |
0.04 |
0.04 |
|
系统性能 |
|
|
|
|
|
|
比例因子误差(全温) |
≤0.2% |
≤0.1% |
≤0.1% |
≤0.08% |
≤0.1% |
|
g-灵敏度 |
<0.03°/sec/g |
<0.02°/sec/g |
<0.02°/sec/g |
<0.01°/sec/g |
<0.01°/sec/g |
|
轴未对准 |
1mrad |
|
|
|
|
|
温度 |
工作:-40°C
to +85°C
非工作:-55°C
to +85°C |
|
|
数据接口及更新率 |
RS485,
可达500Hz |
|
|
|
|
传感器带宽 |
100Hz
,内置温度传感器 |
|
|
|
|
启动时间(惯性) |
<0.65 sec
在100Hz |
|
|
|
|
冲击 |
500g,
任意轴30msec
1/2 sine |
|
|
|
|
工作振动 |
6g RMS (20Hz to 2KHz) |
|
|
|
|
重量 |
110 g |
110 g |
28 g |
388 g |
110 g |
|
尺寸 |
5.0x4.5x3.2 |
5.0x4.5x3.2 |
2.54x2.54x2.54 |
7.62x7.8x5.72 |
5.0x4.5x3.2 |
|
|
|
|
|
 |
|